General characteristics of elastic force
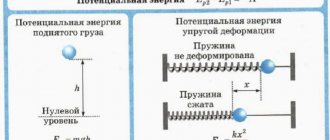
Elastic force occurs when bodies are deformed, for example, when a spring is stretched or compressed. Deformation is a change in the shape and size of the body.
Rice. 1. The elastic force when the spring is deformed.
If the deformation of the body disappears, then the elastic force will also disappear
The cause of elastic forces is the forces of attraction and repulsion between particles (molecules or atoms) that make up all bodies. If you slightly increase the distance between the particles, then the interaction forces turn out to be forces of attraction between them. If the distance between the particles is slightly reduced, they become repulsive forces. The elastic force acting on the body is related to the deformation of the body as follows:
$F control=-kx$,
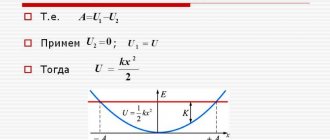
where F ex. – modulus of elastic force, x – elongation of the body (the distance by which the original length of the body changes), k – coefficient of proportionality, called spring stiffness, measured in N/m. This elastic force formula serves as an expression of Hooke's law. The definition of Hooke's law is expressed as follows: the elastic force arising during deformation of a body is proportional to the elongation of the body and is directed opposite to the movement of particles of the body relative to other particles during deformation.
Rice. 2. Formula Hooke's law.
The direct proportional relationship between elastic force and elongation is used in dynamometers - devices for measuring force. Elasticity forces work in technology and nature: in watch mechanisms, in shock absorbers in transport, in ropes and cables, in human bones and muscles.
Elastic force. Hooke's law
In this topic we will talk about elastic forces, as well as Hooke’s law.
It was previously said that the main forces in mechanics are gravitational forces, elastic forces and friction forces.
It is known that one of the manifestations of the interaction of bodies is their deformation
.
Deformation
is a change in the shape and size of a body that occurs due to unequal displacement of various parts of one body as a result of the influence of another body.
Let's consider why deformations are not the same for different bodies?
To answer this question, let’s remember the structure of matter. All substances consist of particles (molecules, atoms, ions), between which there are interaction forces. These are forces of an electromagnetic nature, which, depending on the distance between particles, manifest themselves either as attractive or repulsive forces. If an impact on a body causes an increase in the distance between molecules, then the forces of intermolecular attraction prevent this. The reduction in distance between molecules is counteracted by repulsive forces. So, in order not to consider complex electromagnetic interactions, elastic force is introduced in mechanics to characterize these phenomena.
Elastic force
is the force that arises during the deformation of any solid body, as well as during the compression of liquids and gases.
The force of elasticity prevents changes in the size and shape of the body
.
It should also be remembered that elastic forces are always perpendicular to the contact surface of interacting bodies, and if bodies such as springs or threads participate in the interaction, then the elastic forces are directed along their axis.
Let us consider what role this force plays in the interaction of bodies. Let's carry out the following experiment. Attach a rubber cord (with marks at equal distances from each other) to a block lying on the table and slowly begin to pull it in a horizontal direction. Under the influence of force, the cord stretches, and only when the entire cord stretches by a certain amount will the block begin to move. How to explain this?
When the cord is stretched, some of its parts are displaced relative to others, as a result of which an elastic force arises in the cord, equal in magnitude to the deforming force. From this moment on, the cord plays the role of a “transmitting link”. The same phenomena always occur when movement from one body to another is transmitted using “connections,” that is, threads, cords, springs, cables, various couplings, and so on.
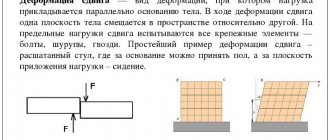
Based on the nature of the displacement of parts of the body (or rather, the molecular layers inside it) relative to each other, several types of deformation are distinguished:
stretching, compression, bending, torsion, shear.
During tensile deformation,
the distance between the molecular layers increases
. Such deformation is experienced, for example, by cables of cranes, cable cars, towing cables, and strings of musical instruments.
And with compressive deformation,
the distance between the molecular layers decreases
. For example, walls and foundations of buildings are subject to compression.
If, as a result of the impact, some molecular layers are stretched and others are compressed, then bending deformation
. Floor beams in buildings and bridges experience bending deformation.
During torsional deformation
rotation of some molecular layers relative to others occurs.
And if some layers of molecules are displaced relative to others, then shear deformation
.
In addition to this, deformations
also divided into
elastic
and
inelastic
, or
plastic
.
Deformation
called
elastic
if, after the cessation of the impact, the body completely restores its original shape and size.
And if this does not happen, then deformation
called
inelastic
or
plastic
.
Of course, deformation
of a particular body can be both elastic and inelastic, since its nature
depends not only on the properties of the body
,
but also on the magnitude of the impact on it
.
Various types of deformations occur in any structures and mechanisms, and it is necessary to establish laws that will allow one to calculate the magnitude of these deformations.
The most common and quite simply described mathematically are elastic deformations of tension or compression.
.
If the interaction of these bodies with each other is no different, then what is the acceleration of the third body when it interacts with one of the first two?
Let's conduct an experiment. Let's attach one end of a rubber cord with marks to a vertical wall, and the other to a dynamometer, on which we will apply force. Place a ruler under the cord. Determining the force acting on the end of the cord using a dynamometer, we will record the displacement of the end of the cord along the ruler and the change in the distances between the marks.
Total elongation
cord, determined by the displacement of its end, is
the sum of the elongations of all its parts
.
Similarly, the total shortening
, for example, when compressing a spring, is
the sum of the decreases
in the distances between all its turns.
If we denote the initial length of the cord by l0
, and the final length - through
l
, then to characterize tensile or compression deformations, you can introduce absolute elongation ∆
l
, equal to the modulus of the difference between the final and initial length of the body.
If the cord no longer elongates under the influence of a deforming force, then its action is balanced by an elastic force.
The first truly scientific study of the process of elastic stretching and compression of matter was undertaken by Robert Hooke. He established experimentally that for small tensile or compressive deformations, the absolute elongation of a body is directly proportional to the deforming force
.
In practice, it is often necessary to determine the elastic force that arises in a body during its deformation, and Hooke’s law
formulated as follows: the modulus of the elastic force that occurs during small compressive or tensile deformations of a body is directly proportional to the magnitude of the absolute elongation.
where k
is a proportionality coefficient called
body
stiffness .
Rigidity
is
a characteristic
of a given body (spring, cord, rod) and
depends on its transverse and longitudinal dimensions
,
chemical composition, and structure of the substance
from which the body is made.
The SI unit of measurement for hardness is N/m
(newton per meter).
When calculating the motion of bodies under the action of elastic force, it is necessary to take into account its direction. If we choose the origin under the extreme point of the undeformed body, then the absolute elongation can be characterized by the coordinate of the end of the deformed body.
When the sample is stretched or compressed, the elastic force is directed opposite to the displacement of its end. Then we can write Hooke’s law for the projection of the elastic force onto the selected coordinate axis in the form:
One or another form of writing Hooke’s law is used depending on the conditions of the problem and the quantity that needs to be determined.
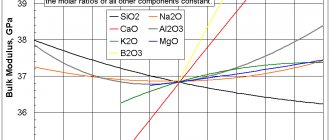
The graph of the dependence of the elastic force on the absolute elongation of the body is a straight line
, the angle of inclination of which to the abscissa axis depends on the stiffness coefficient
k
.
The elastic force, like any of the forces considered in mechanics, obeys Newton’s laws, and according to Hooke’s law, it is possible to calculate the deformations that arise during the interactions of bodies. However, it should be noted that Hooke’s law is well satisfied only for small deformations
.
A special case of the manifestation of elastic force is weight
bodies.
The weight of a body
is the force with which the body, due to its attraction to the Earth,
acts on a support or suspension that is motionless relative to it
.
The weight of the body arises as a result of its deformation caused by the action of a force from the support (normal reaction force of the support) or suspension (tension force).
It should be remembered that the force of weight is significantly different from the force of gravity
.
Firstly, the weight
of a body is due to the force of gravity and intermolecular forces in matter, that is, it is
a force of electromagnetic nature
.
And gravity
is
gravitational force
. _
Secondly, they are applied to different bodies: gravity is applied to the body, and weight is applied to the support or suspension
u.
Thirdly, the direction of the body weight force does not necessarily coincide with the vertical direction
.
The force
of gravity
acting on a body
in a given place on the Earth is constant
and does not depend on the nature of the body’s movement.
Weight depends on the acceleration
with which the body moves.
Main conclusions:
– Elastic forces and types of body deformation are considered.
– Hooke’s law was formulated.
– The main differences between the force of weight and the force of gravity are considered.
Properties of elastic force
Elastic forces include the reaction force of support and body weight. The reaction force (N) on the side of the support on the body occurs when the body is placed on some surface (support).
If a body is suspended on a thread, then this same force is called the tension force of the thread (T).
The elastic force has a number of features:
- occur during deformation
- occur simultaneously in two bodies
- perpendicular to the surface
- opposite in direction of displacement.
Body weight (P) is the force with which the body acts on a horizontal support or vertical suspension due to its attraction to the Earth.
Body weight is denoted by the letter P and measured in Newtons.
If the support of a body is horizontal and motionless, then the weight of such a body is numerically equal to the force of gravity acting on this body and is equal to P=mg
If a body moves upward with acceleration a, then the weight of this body is greater than the weight of the body at rest and is equal to $P=(g+a)m$
But if a body moves downward with acceleration a, then its weight $P =(ga)m$
When the acceleration of the body and the acceleration of gravity are equal, the weight of the body is zero. This is a state of weightlessness.
Rice. 3. Table comparing elastic force with other forces.